



【大纪元2024年10月23日讯】(大纪元记者徐乃义台湾桃园报导)健行科技大学机械工程系林仲廉教授领导的研究团队,以“连续体机械手臂系统”获得今年2024年台湾创新技术博览会(原台北国际发明暨技术交易展)金牌奖,创作由林仲廉教授及其指导的研究生梁诏闳共同完成。
由于在现今灾难发生后往往造成许多危险区域或狭窄空间,人类搜救员无法直接进入,此时可以在狭窄空间中进行搜救的机器人则较好地解决了此类问题,但同时复杂、未知、恶劣的搜救环境也对搜救机器人提出了较高的要求。然而完全由机器人自主完成搜救工作实现较为困难,那么如何在狭窄空间中通过人机协作进行伤患搜救也是亟待解决的问题。
因此,亟需研究一种面向狭窄空间的搜救机器人,以解决狭窄空间或危险环境的搜救难题。本创作系有关一种以仿生的角度模拟人体手臂之连续体机械手臂,尤其是可以提供一种适合狭窄空间危险环境、越障能力强,且能进行探测定位,由此解决狭窄空间或危险环境的搜救难题之连续体机械手臂系统。
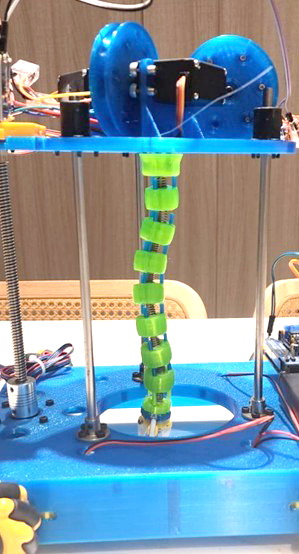
本创作可用于灾难发生时之救难机器人或局限空间之环境检查,在任务执行中需要具有纤细且合规结构的辅助机器人,以适应灾难现场的复杂配置。本创作之连续体机械手臂的主体挠性骨架(flexible backbone)系以球骨躯干为基础,将球骨等距离定位,各球骨躯干系以弹性体连结,可以采用模组化组装概念,拆卸组装容易,其长度可依需求随时调整。
因弹性体柔软的特性使球骨躯干可以产生连续弯曲变化,本构想设计之优点在于铁质弹簧可以容许较大变形及较大负荷,该结构最大的弯曲角度可接近270度,优于目前很多设计。
另外由于传统接触式的感测器并不容易安装于挠性骨架上,会增加手臂机体之负担,且机构空间也不依定允许安装。本系统开发压电感测器嵌入手臂之作法,可以有效解决相关的量测问题,商品化应用潜力很大。◇
责任编辑:昌英

